
YOLOが向いている・向いていない画像認識タスクとは?評価基準・導入ポイントを徹底解説!
最終更新日:2026年03月29日
記事監修者:森下 佳宏|BizTech株式会社 代表取締役

- YOLOが向いているかどうかはモデルの性能ではなく業務要件で決まる
- 外観検査・色差評価・医療診断・高密度オクルージョン環境など、YOLOの高速物体検出アプローチ自体がミスマッチになる業務が存在
- YOLO導入を実運用まで到達させるには、データ設計・推論環境設計・多層構造化・外注と内製の役割分担という4つの実践設計が必要
YOLOの導入を検討する際、画像認識の性能や精度への期待が先行しがちですが、業務要件との相性を確認しないまま進めると、デモ環境では動いても本番で使い物にならないという事態に陥りやすくなります。
外観検査への適用で期待外れに終わるケース、監視・安全用途では高い効果を発揮するケースの差は、モデルの出来不出来ではなく、業務が要求する問題の性質がYOLOのアプローチと合っているかどうかで生じます。
本記事では、YOLO導入の向き不向きを判断するための7つの軸を整理したうえで、向いている業務・向いていない業務を具体的な現場ケースとともに解説します。さらに、判断軸が整理できた後でもPoC止まりに終わりやすい実装・運用フェーズの落とし穴と、それを回避するための実践ポイントまでカバーします。
画像認識に強いAI会社の選定・紹介を行います
今年度AI相談急増中!紹介実績1,000件超え!
・ご相談からご紹介まで完全無料
・貴社に最適な会社に手間なく出会える
・AIのプロが貴社の代わりに数社選定
・お客様満足度96.8%超
・物体検出、異常検知、類似画像検索等
完全無料・最短1日でご紹介 画像認識に強いAI会社選定を依頼する
画像認識に強いAI開発会社をご自分で選びたい方はこちらで特集していますので併せてご覧ください。
目次
YOLO導入の向き不向きを決める7つの判断軸

YOLOが自社業務に合うかどうかは、モデルの性能そのものではなく、業務要件と現場環境の特性で決まります。「精度が高い」「速い」という評判だけで選定すると、PoC(概念実証)止まりに終わるリスクがあります。
以下の7つの判断軸をもとに、導入前に自社の業務要件を整理してみてください。各軸の詳細と、YOLO向き・不向きの判断については後続のセクションで解説します。
| 判断軸 | 確認すべきポイント |
|---|---|
| 属性と挙動の同時把握が必要か | 「何があるか(属性)」と「どう動いているか(挙動)」を同時にリアルタイムで把握する必要があるか 単純な通過・侵入検知で業務が成立するか。 |
| 既存センサーとのROI比較 | 赤外線センサーなど既存の物理センサーと比べて、検知ポイント数・対象の種類・運用コストの観点でYOLO導入のROIが上回るか。 |
| オクルージョン(重なり)の発生頻度 | 対象物同士が重なり合って一部しか見えない状態が、業務上どの程度の頻度・深刻度で発生するか。 |
| 背景理解・コンテキストの重要度 | 物体の有無だけでなく、「どのような状況・環境の中にあるか」という文脈まで踏まえた判断が必要か エッジ環境での運用が前提となるか。 |
| 即応性(リアルタイム処理)の必要性 | 検出結果をその場で警報・停止・制御などのアクションに直結させる必要があるか 蓄積データのバッチ分析・後処理で対応できるか。 |
| 検出対象が「物体」か「微細パターン」か | 検出したいのは輪郭が明確でカテゴリ定義できる対象物か 傷・色ムラ・凹凸といった正常表面との差分(テクスチャ変化)か。 |
| 現場環境の変動の大きさ | 照明条件・カメラ角度・撮影距離などを固定・標準化できるか 時間帯・天候・季節によって入力画像の条件が大きく変動するか |
画像認識に強いAI会社の選定・紹介を行います
今年度AI相談急増中!紹介実績1,000件超え!
・ご相談からご紹介まで完全無料
・貴社に最適な会社に手間なく出会える
・AIのプロが貴社の代わりに数社選定
・お客様満足度96.8%超
・物体検出、異常検知、類似画像検索等
完全無料・最短1日でご紹介 画像認識に強いAI会社選定を依頼する
YOLOが向いている画像認識タスクとは?
前章の7つの判断軸に照らしたとき、YOLOの強みが最も発揮されるのは以下の業務領域です。自社業務と照らし合わせながら読み進めてください。
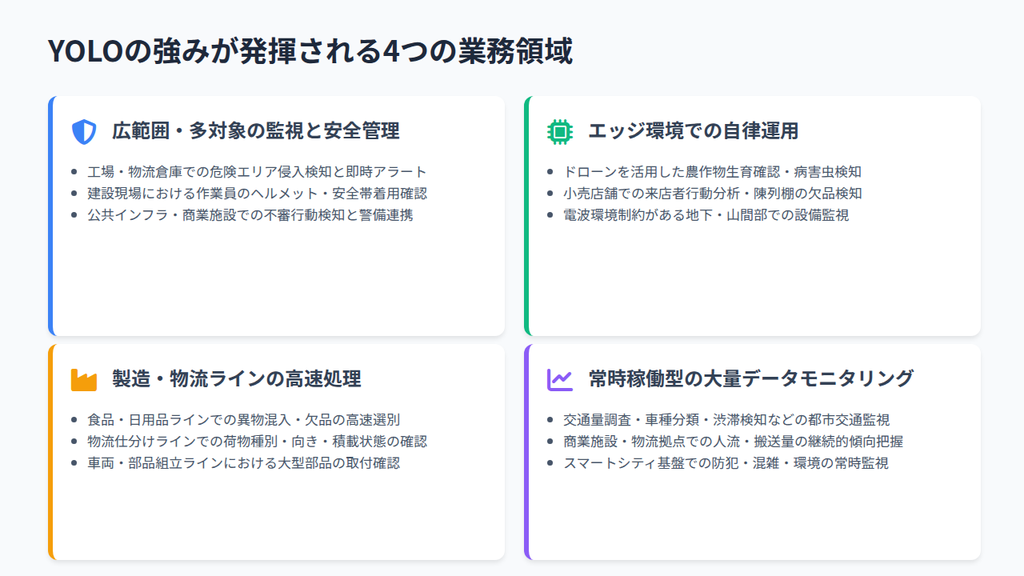
広範囲・多対象の同時検知が必要な監視・安全管理業務
決め手となる判断軸:
- 属性と挙動の同時把握
- 既存センサーとのROI比較
- 即応性
人物・車両など複数種類の対象が同時に動き回る環境で、「誰が(属性)」「どこへ向かっているか(挙動)」をリアルタイムで把握する必要がある業務ではYOLOの一段検出による高速推論が強みになります。
赤外線センサーによる単純な通過検知で目的が達成できるうちは、非AIのほうがコスト効率は高くなります。
一方、検知ポイントが増えるほど、赤外線センサーの多点化コスト(機器・配線・保守)よりも、広角カメラ1台+YOLOの構成のほうが運用コストを下回るケースが出てきます。対象の属性識別まで必要になった時点でROIの分岐点を超えます。
具体的には以下のような業務が該当します。
- 工場・物流倉庫での作業員・重機の危険エリア侵入検知と即時アラート
- 建設現場における作業員のヘルメット・安全帯着用状況のリアルタイム確認
- 公共インフラ・商業施設での不審行動検知と警備連携
検出と同時にアラートや設備停止などのアクションが発動する業務構造であるほど、YOLOの即応性が業務価値に直結します。
エッジ環境での自律運用が必要な現場
決め手となる判断軸:
- 既存センサーとのROI比較
- 背景理解・コンテキストの重要度現場環境の変動の大きさ
通信環境が不安定な現場や、映像データを常時クラウドへ送信するコストが膨らむ業務ではエッジ側で推論を完結できる構成が必要です。YOLOはモデルサイズの選択肢が広く、低スペックのエッジデバイスでも安定稼働しやすい点が特徴です。
なお、2025年9月にリリースされたYOLO26は、NMS(非最大値抑制)処理を不要とするエンドツーエンドアーキテクチャを採用しており、低消費電力デバイスへのデプロイ適性がこれまでのYOLOファミリーより高まっています。照明条件や撮影角度を標準化できる現場であれば、モデルの再現性が安定し、エッジ運用の信頼性を高めやすくなります。
具体的には以下のような業務が該当します。
- ドローンを活用した農業分野での農作物生育確認・病害虫検知
- 小売店舗での来店者行動分析・陳列棚の欠品検知
- 電波環境の制約がある地下・山間部・船舶設備での設備監視
高度な文脈理解よりも、限られた計算リソースの中で安定したリアルタイム検出を優先すべき現場では、処理負荷の大きいTransformer系モデルよりYOLOが現実的な選択肢になります。
製造・物流ラインの高スループット処理
決め手となる判断軸:
- 属性と挙動の同時把握
- 即応性
- 検出対象が「物体」か「微細パターン」か
1秒間に数十個の対象が通過するラインや、複数の対象が同時に動き回る空間では処理速度と検出安定性の両立が不可欠です。検出対象が「人・車両・荷物・異物」など輪郭が明確でカテゴリ定義できる物体であれば、YOLOのバウンディングボックス検出が高い精度で機能します。
一方、0.5mm以下の傷や色ムラといった微細異常は「物体」ではなくテクスチャの差分であるため、このような検出対象が主目的の場合はYOLO以外の手法が適切です。
具体的には、以下のような業務が該当します。
- 食品・日用品の製造ラインでの異物混入・欠品の高速スクリーニング
- 物流仕分けラインでの荷物種別・向き・積載状態の確認
- 車両・部品の組立ラインにおける大型部品の取り付け有無の確認
常時稼働型の大量データモニタリング
決め手となる判断軸:
- 即応性
- 現場環境の変動の大きさ
長時間にわたる常時監視や、膨大な映像・画像データを連続処理する業務では、件あたりの検出精度よりも処理の安定性・スループット・見落とし防止の網羅性が優先されます。YOLOは高速な連続処理を得意とし、わずかな誤差を追求するよりも傾向把握・全体最適を重視する業務と相性の良いモデルです。
具体的には以下のような業務が該当します。
- 交通量調査・車種分類・渋滞検知などの都市交通モニタリング
- 商業施設・物流拠点での人流・搬送量の継続的な傾向把握
- スマートシティ基盤における防犯・混雑・環境モニタリングの常時稼働
撮影条件(照明・カメラ位置)を標準化できる環境であれば、学習時と推論時のデータ分布差が小さくなり、長期運用でのモデル安定性も確保しやすくなります。
YOLOが向いていない画像認識タスクとは?
前章の判断軸に照らしたとき、YOLOの「高速な物体検出」というアプローチ自体がミスマッチになる業務領域があります。単純にモデルの精度や設定の問題ではなく、そもそも解くべき問題の性質が異なることを理解しておくことが重要です。
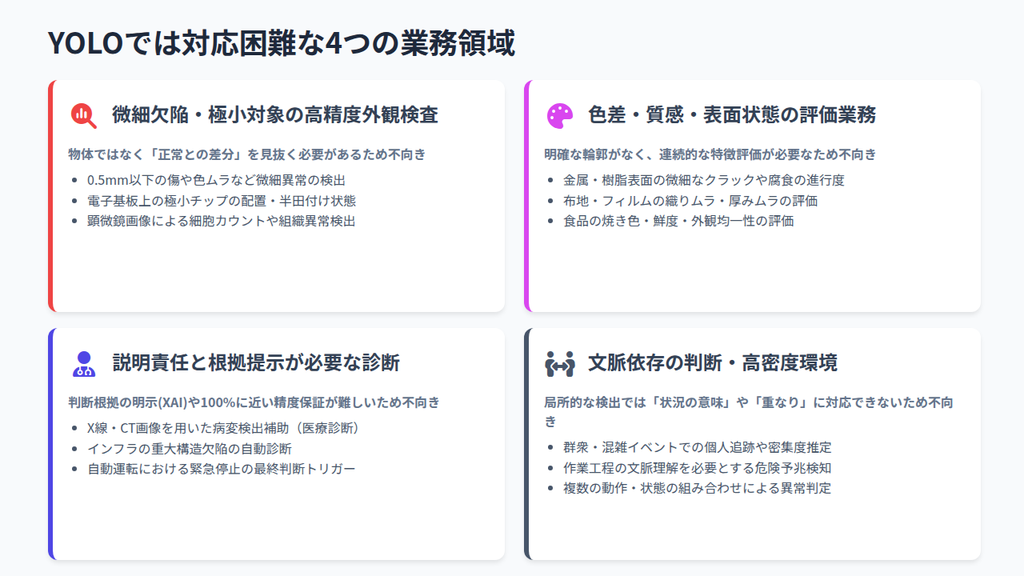
微細欠陥・極小対象の高精度外観検査
決め手となる判断軸:
- 検出対象が「物体」か「微細パターン」か
- オクルージョンの発生頻度】
外観検査で求められる微小欠陥の検出は、独立した物体の発見ではなく、正常パターンとの差分を見抜く作業です。0.5mm以下の傷や色ムラ、わずかな凹凸は、カテゴリ化された対象物ではなく、異常なテクスチャ変化として現れます。
物体を矩形で囲って分類するYOLOとはアプローチの前提が根本的に異なります。特に以下のような環境では、YOLOの物体検出アプローチでは対応できません。
- 電子基板上の極小チップの配置・半田付け状態の検査
- 顕微鏡画像による細胞カウントや組織異常の検出
- 遠距離・広角カメラからの小物体の高精度検知
このような業務では、Faster R-CNNなどの二段階物体検出器や、高解像度対応のViTといった極小領域を高精度に識別できるモデルが候補になります。ただし、欠陥パターンが事前に定義しきれない場合は、正常データのみで学習するアノマリー検知(異常検知)の採用も検討すべきです。
微細欠陥の外観検査では、まず「物体検出」というアプローチ自体が適切かを見直すことが先決です。
色差・質感・表面状態の評価業務
決め手となる判断軸:
- 検出対象が「物体」か「微細パターン」か
色味のわずかな差や質感の均一性は、明確な輪郭を持つ対象ではなく、画像全体に広がる連続的な特徴として現れます。YOLOの局所的なバウンディングボックスで切り出すアプローチでは状態評価型の問題には対応できません。
具体的には、以下のような業務が該当します。
- 金属・樹脂表面の微細なクラックや腐食の進行度判定
- 布地・フィルムの織りムラ・厚みムラの評価
- 食品の焼き色・鮮度・外観均一性の評価
- 良品データのみで学習する「良品外れ検知」全般
これらは物体の有無ではなく、状態の違いを判定する問題です。Mask R-CNNやU-Netなど画素単位で領域を抽出できるセグメンテーション手法や、正常データのみから逸脱を検知するアノマリー検知が適しています。
特にアノマリー検知は想定外の欠陥パターンにも対応できるため、欠陥定義が完全には固まっていない工程にも導入しやすいアプローチです。
高い説明責任と根拠提示が求められる診断・最終判断業務
決め手となる判断軸:
- 背景理解・コンテキストの重要度
- 即応性
ほぼ100%に近い精度と、「なぜそう判断したか」という根拠の明示が求められる領域では、YOLOは向いていません。YOLOは検出速度を優先する設計であり、判断の説明可能性(XAI)や多角的な根拠担保を前提とした設計にはなっていないためです。
具体的には、以下のような業務が該当します。
- X線・CT画像を用いた病変の検出補助(医療診断支援)
- 橋梁・トンネルなどインフラの重大構造欠陥の自動診断
- 自動運転における緊急停止など、生命・財産に直結する最終判断のトリガー
これらの用途では、複数モデルを統合するアンサンブル学習や、AIと明示的な判定基準を組み合わせるルールベースとのハイブリッド型アプローチが適しています。また、近年ではGrad-CAMなどの可視化技術を組み合わせて判断根拠を提示する実装も普及しており、規制対応・監査対応が求められる業界では説明可能性の設計が必須要件になっています。
高密度オクルージョンや危険予兆など文脈依存の判断業務
決め手となる判断軸:
- オクルージョンの発生頻度
- 背景理解・コンテキストの重要度
人や物が密集して互いに重なり合う環境や、「物体が存在するかどうか」だけでなく「その状況が何を意味するか」という文脈判断が必要な業務では、YOLOの局所的・高速な検出アプローチが限界を迎えます。
具体的には、以下のような業務が該当します。
- 群衆・混雑イベントでの個人追跡や密集度の精密推定
- 作業工程の文脈理解を必要とする危険行動の予兆検知
- 複数の動作・状態の組み合わせから異常を判定する行動認識
このような業務では、画像全体を俯瞰して特徴を捉えるVision Transformer(ViT)系モデルや、時系列情報を組み合わせる動画解析モデルが候補になります。ただし、これらは計算コストが高く、エッジ環境での安定稼働が難しい場合もあるため、精度・説明性・運用コストのトレードオフを業務要件に照らして整理することがモデル選定の出発点になります。
画像認識に強いAI会社の選定・紹介を行います
今年度AI相談急増中!紹介実績1,000件超え!
・ご相談からご紹介まで完全無料
・貴社に最適な会社に手間なく出会える
・AIのプロが貴社の代わりに数社選定
・お客様満足度96.8%超
・物体検出、異常検知、類似画像検索等
完全無料・最短1日でご紹介 画像認識に強いAI会社選定を依頼する
YOLO導入のポイント

YOLOは導入してからが本番です。判断軸の整理ができていても以下の4点で手を抜くと、デモ止まり・PoC止まりに終わります。
- データ設計
- 運用アーキテクチャ
- システム構成
- 体制構築
以下では、実運用まで到達するための具体的なポイントを解説します。
「現場再現」を前提としたデータ設計
YOLO導入の成否を最も左右するのは、モデルの選定よりも学習データが現場条件を正しく再現できているかです。デモ環境では高精度だったのに本番環境で精度が落ちるケースの大半は、データ設計の段階で現場の変動要素を織り込めていないことが原因です。
現場再現という観点から最低限整備すべきポイントは以下のとおりです。
| 整備項目 | 具体的な対応内容 | 見落としたときのリスク |
|---|---|---|
| 照明条件の網羅 | 実運用と同じ明るさ・影・反射・逆光条件を学習データに含める 屋外環境では時間帯・季節ごとのサンプリングが必要です | 照明変動が発生するたびに検出精度が低下します |
| カメラ設置条件の標準化 | 設置高さ・画角・撮影距離を固定し、学習時と推論時のデータ分布差を最小化します。 | 設置条件がずれるたびに再学習コストが発生します |
| 異常パターンのバリエーション確保 | 軽微・中度・重度の欠陥バリエーションを網羅します 稀少ケースはData Augmentationで補完することも検討してください | 軽微な異常を見逃します |
| ネガティブサンプルの収集 | 「検出してはいけないもの」を意図的に学習データへ含めます 現場に当たり前に存在するが異常ではないものを明示的に学習させます | 誤検知率が高止まりし、現場担当者のアラート疲れを招きます |
なお、データ収集・アノテーションは導入工数の中で最もコストがかかる工程です。外部パートナーへの委託か内製化かを早期に判断し、体制を先に確保してから開発に入ることを推奨します。
推論環境の設計をモデル選定と同時に行う
YOLOのリアルタイム処理能力は、推論環境の設計が伴って初めて発揮されます。モデルを選んだ後に環境を決めようとすると、ハードウェアのスペック不足や通信遅延で要件を満たせないことが判明して手戻りが発生します。
推論環境の設計で事前に確定すべき項目は以下のとおりです。
| 確定すべき項目 | 確認・検討内容 | 判断のポイント |
|---|---|---|
| エッジ推論 vs クラウド推論 | 即応性・通信コスト・セキュリティ要件を整理 | 機密性の高い映像データはエッジで完結させる構成が有利 |
| 推論遅延の許容値(SLA) | 何ミリ秒以内に検出結果が必要かを業務要件から逆算 | 安全監視やライン制御では、遅延が直接リスクに直結 |
| ハードウェア構成 | 以下の3択を要件に照らして選定します。
| YOLO26のようなNMS不要モデルの登場により、低消費電力デバイスへの適性が高まっている モデルとハードウェアをセットで選定 |
| 同時稼働台数・スケール要件 | 複数カメラ・複数拠点での同時稼働台数を想定し、推論サーバーの負荷設計と冗長構成を決定 | 拠点拡張を見越したスケール設計を初期段階で行わないと、後から構成変更のコストが膨らむ |
YOLO単体で完結させず、多層構造で設計する
実務においてYOLO単体で完結する構成は、シンプルな検知用途を除けばほぼありません。YOLOを「一次スクリーニング」と位置づけ、後段の処理と組み合わせる多層構造が精度と運用安定性の両立に有効です。
標準的な多層構造の例は以下のとおりです。
- YOLO(一次検出):対象・異常候補を広く・速く拾う
- ルールベースフィルタ:サイズ・位置・発生頻度などで明らかな誤検知を機械的に除外する
- 二次AIモデル:高精度な分類・セグメンテーション・アノマリースコアリングで絞り込む
- 人による最終確認:最終判断と責任の所在を担保する(特に安全・品質領域)
外観検査であれば、YOLOで対象物の位置を切り出したうえで、アノマリー検知モデルが正常品からの逸脱度をスコアリングする構成が実績を積んでいます。
「見逃し」と「誤検知」のトレードオフは、このスコアの閾値調整で業務要件に合わせて調整できます。単体では難しいバランス調整が多層構造によって現実的になります。
PoC設計から再学習体制まで外注と内製の役割を分担する
YOLO導入の失敗パターンで最も多いのは、技術選定・モデル学習だけに注力して、現場フローの再設計・KPI定義・継続的な再学習体制の構築が後回しになるケースです。これらが整わないと、精度は出ていても業務に組み込めない、あるいは運用フェーズで性能が劣化していく事態に陥ります。
外注と内製の判断基準として、以下のような役割分担が実務上の定石になっています。
| 担当 | 該当する工程 | 理由 |
|---|---|---|
| 外注 | 導入初期
| 導入初期ほど判断ミスのコストが大きく、専門パートナーの知見が有効 |
| 内製 | 運用フェーズ以降
| 現場に近い担当者が継続的に関与することで、モデルの鮮度を維持 |
導入初期に外部知見で成功パターンを確立し、安定後に段階的に内製化していくハイブリッド運用が、現実的かつコスト効率の高いアプローチです。特にデータ設計とKPI定義は、後から修正するコストが非常に大きいため、外部パートナーとの協業を前提にした上で、最初から正しく設計することが重要です。
YOLOの向き・不向きについてよくある質問まとめ
- YOLOが自社業務に向いているかどうかは、何を基準に判断すればいいですか?
モデルの性能よりも業務要件と現場環境の特性で判断します。具体的には以下の7軸を確認してください。
- 属性と挙動の同時把握が必要か(単純な通過検知で成立するか)
- 赤外線センサーなど既存手段と比較したROIが上回るか
- 対象物のオクルージョン(重なり)がどの程度発生するか
- 物体の背景・文脈まで踏まえた判断が必要か、エッジ運用が前提か
- 検出結果をその場でアクションに直結させる即応性が必要か
- 検出対象が輪郭の明確な「物体」か、傷・色ムラといった「微細パターン」か
- 照明・カメラ条件を固定・標準化できる現場かどうか
「精度が高い」「速い」という評判だけで選定すると、PoC止まりに終わるリスクがあります。
- YOLOはどんな業務でも使えますか?
以下に該当する業務では、YOLOの「高速な物体検出」アプローチ自体がミスマッチになります。
- 微細欠陥・極小対象の高精度外観検査(0.5mm以下の傷、電子基板の極小チップ検査など)→ 正常パターンとの差分を検出する問題であり、物体検出とは前提が異なる
- 色差・質感・表面状態の評価業務(金属腐食の進行度、布地の織りムラ、良品外れ検知など)→ 画像全体の連続的な特徴を扱う問題でバウンディングボックスでは対応できない
- 説明責任と根拠提示が求められる診断・最終判断業務(医療画像診断、インフラ構造欠陥診断など)→ YOLOは説明可能性(XAI)を前提とした設計になっていない
- 高密度オクルージョンや危険予兆など文脈依存の判断業務(群衆追跡、危険行動の予兆検知など)→ 局所的・高速な検出アプローチでは文脈判断が困難
モデルの設定や精度調整の問題ではなく、解くべき問題の性質そのものが異なる点を理解したうえで手法選定を行う必要があります。
- YOLOはリアルタイムでなければ意味がありませんか?
必ずしもそうではありません。
ただし、即時アクションが必要な業務でこそ真価を発揮します。バッチ解析中心の業務では、R-CNNなどの二段検出型の検出手法をはじめ、精度重視の他モデルが合理的な場合もあります。
- YOLOが自社業務に向いているかどうか判断できないまま開発会社に相談すると、ベンダー側の提案に引きずられてしまわないか不安です。どう対処すればいいですか?
この懸念は実務上よくある問題です。開発会社はYOLOで対応可能な範囲を前提に提案を組み立てるため、本来別の手法が適切なケースでも「まずPoC」という方向に進みやすくなります。
対処策として有効なのは、相談前に本記事の7つの判断軸を使って自社業務の要件を整理し、「何が必要か」ではなく「何を判断したいか」という問いを先に言語化しておくことです。特に「検出対象が物体かパターンか」「即応性が必要かバッチ処理で足りるか」の2軸は、提案の妥当性を評価する際の核心的な論点になります。
また、複数ベンダーの提案を横比較する際に、選定根拠を業務要件に照らして評価できる第三者の視点があると判断の精度が上がります。AI Marketでは、ベンダー選定前の要件整理段階からコンサルタントが伴走し、提案内容の妥当性確認を含めた会社選定支援を無料で行っています。「まず何を確認すべきか」という段階からご相談いただけます。
- PoCに着手する前にフィジビリティ(実現可能性)を確認したいのですが、そのためだけに開発会社に相談するのは早すぎますか?コストや工数が発生しないか心配です。
PoC前のフィジビリティ確認は、むしろ最も重要なタイミングの相談です。開発着手後に「そもそもYOLOで解ける問題ではなかった」と判明した場合のコスト(開発費・検証工数・現場調整コスト)と比較すると、事前確認に投じるコストは圧倒的に小さくなります。
フィジビリティ確認の段階では、以下を整理しておくと相談が進みやすくなります。
- 検出したい対象の具体的な特徴(サイズ・輪郭の明確さ・異常の現れ方)
- 現場環境の変動要素(照明・カメラ条件の標準化可否)
- 検出結果をどのタイミングでアクションに使うか(リアルタイム vs バッチ)
AI Marketでは、構想が固まっていない段階や「まず自社の業務がAIで解ける問題かを確認したい」という状態からでも、専門コンサルタントが要件を整理したうえで適切な会社を紹介します。相談自体は完全無料で、1〜3営業日以内に対応します。
まとめ
YOLOが向いているかどうかは、モデルの性能よりも業務特性で決まります。YOLOは導入判断を誤ると、開発コスト・検証期間・現場調整のすべてが無駄になるリスクがあります。
本記事で解説した7つの判断軸を事前に整理することが、適切なモデル選定と実運用への最短経路です。
特に判断が難しいのは、以下のような局面です。
- 複数のベンダーからYOLO採用を提案されているが、その根拠が自社の業務要件に対して妥当かどうか評価する軸がない
- 外観検査や品質管理への適用を検討しているが、YOLOで解ける問題なのかどうか判断できない
- PoC予算は確保できたが、データ設計・推論環境設計・体制構築のどこから着手すべきか優先順位がつけられない
こうした判断を社内だけで進めようとすると、技術選定の妥当性検証や要件整理に時間がかかり、検討フェーズが長期化しやすくなります。AI Marketでは、YOLO導入を含む画像認識AIの相談を年間1,000件以上受け付けており、業種・用途ごとの導入実績をもとに、モデル選定の妥当性検証・ベンダー比較・要件定義の支援を無料で提供しています。
構想が固まっていない段階からでも相談可能で、1〜3営業日以内に要件に合った専門パートナーをご紹介します。
まず自社業務にYOLOが向いているかどうかを確認したいという段階から、お気軽にご相談ください。

AI Market 運営、BizTech株式会社 代表取締役|2021年にサービス提供を開始したAI Marketのコンサルタントとしても、お客様に寄り添いながら、現場のお客様の課題ヒアリングや企業のご紹介を5年以上実施しています。これまでにLLM・RAGを始め、画像認識、データ分析等、1,000件を超える様々なAI導入相談に対応し、参加累計5,000人を超えるAIイベントを主催。AIシステム開発PM歴8年以上。AI Marketの記事では、AIに関する情報をわかりやすくお伝えしています。(JDLA GENERAL 資格保有)
AI Market 公式𝕏:@AIMarket_jp
Youtubeチャンネル:@aimarket_channel
TikTok:@aimarket_jp
運営会社:BizTech株式会社
掲載記事に関するご意見・ご相談はこちら:ai-market-contents@biz-t.jp

お電話で無料相談
WEBから無料相談(60秒で完了)
今年度問い合わせ急増中
Warning: foreach() argument must be of type array|object, false given in /home/aimarket/ai-market.jp/public_html/wp-content/themes/aimarket/functions.php on line 1594
Warning: foreach() argument must be of type array|object, false given in /home/aimarket/ai-market.jp/public_html/wp-content/themes/aimarket/functions.php on line 1594
