
世界モデルはロボティクスをどう変える?フィジカルAIの実現がもたらす変化や技術的観点、活用領域を徹底解説
最終更新日:2026年01月25日
記事監修者:森下 佳宏|BizTech株式会社 代表取締役
- 従来のロボットが数値を処理する「反応」主体だったのに対し、世界モデルは「なぜそうなるか」という物理的意味を理解
- 高精度な内部モデル(仮想空間)での試行錯誤が可能になるため、実機を損傷させるリスクや現場での検証時間を最小限に抑えられます
- マルチモーダルなセンサー情報を統合し、数秒先の未来を予測して動くフィジカルAIとしての自律性の獲得
- 物流や建設といった不確実性の高い現場での「止まらないオートメーション」が実現
AI(人工知能)が言語や画像の生成において実装を加速させる中、次に注目されているのがフィジカルAI(物理実体を持つAI)を搭載したロボットです。その中核を担う技術が世界モデル(World Models)です。
ロボティクス分野では、高度な自動化が進められてきましたが、その多くは想定された環境で正確に動くことを前提にしていました。しかし実際の現場は変化し続けており、例外や不確実性が避けられません。
この不確実性を理解する技術として注目されているのが、世界モデルです。
本記事では、世界モデルがロボティクスにもたらす変化や、従来技術との違い、導入における技術的観点、活用領域を解説します。単なる自動化を超えた「フィジカルAI」としてのロボティクス活用への知見を得ることができます。
世界モデルの活用に強いAI開発会社の選定・紹介を行います
今年度世界モデルに関する相談急増中!紹介実績1,000件超え!
・ご相談からご紹介まで完全無料
・貴社に最適な会社に手間なく出会える
・AIのプロが貴社の代わりに数社選定
・お客様満足度96.8%超
完全無料・最短1日でご紹介 世界モデルの活用に強いAI開発会社選定を依頼する
AI開発会社をご自分で選びたい方はこちらで特集していますので併せてご覧ください。
目次
従来型のロボットが未知の状況に弱い理由とは?

従来型のロボットは、工場や倉庫などの整備された環境では高い精度を発揮する一方、想定外の状況が発生すると性能が低下します。その背景には、ロボットの設計思想そのものに起因する制約があります。
再設計・ティーチングに際限がない
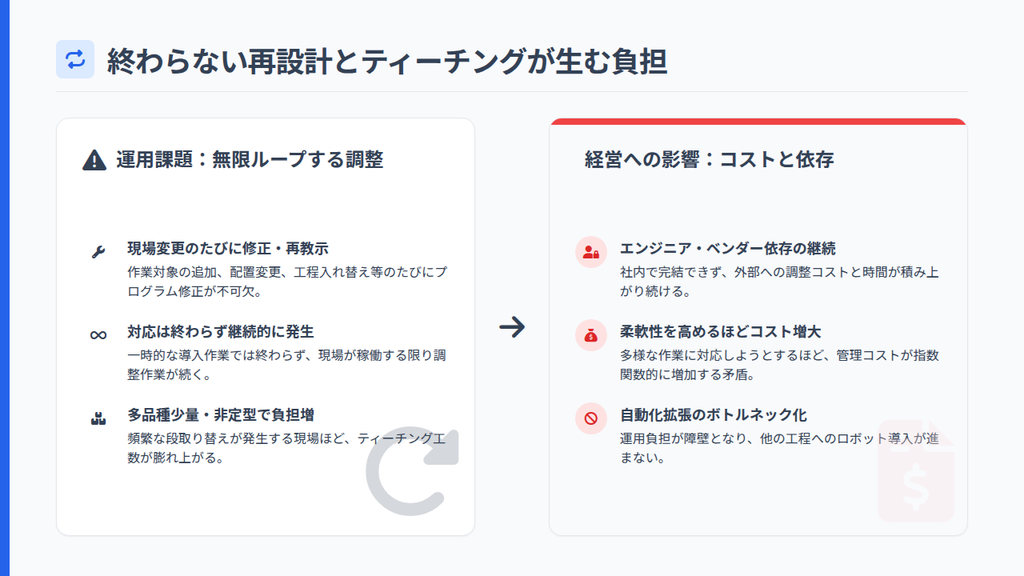
これまでのロボットの運用といえば、現場条件が変わるたびに再設計やティーチングを繰り返す必要がありました。作業対象の種類が追加されたり、配置変更、工程の入れ替えといった変化は、ロボットにとっては新しい前提条件となるため、動作プログラムの修正や再教示が不可欠です。
この対応は一時的には終わらず、現場が動き続ける限り継続的に発生します。そのため、ロボットを導入した後もエンジニアやベンダーへの依存が解消されず、調整するためのコストと時間が積み上がっていきます。
特に、多品種少量生産や非定型作業が多い現場では、この負担が自動化の拡張を阻む要因となるでしょう。
再設計とティーチングが前提となる運用モデルは、ロボットの柔軟性を高めるほどコストが増大するという矛盾を抱えています。
想定された世界に基づいて行動するから
従来のロボットは、定義された条件やシナリオに基づいて「If-Then」の論理、あるいは膨大な教師あり学習に動作する設計となっています。作業対象の位置から形状、順序までをあらかじめ想定し、その範囲内で最適な動作を実行することを前提としています。
しかし、現実世界は予測不可能な事象(エッジケース)に満ちており、そのすべてをデータ化することは不可能です。そのため、設計時に想定されていない状況が発生した場合、ロボットが自ら解釈や判断を行うことができません。
物体の配置が変わる、照明条件が変化する、作業エリアに人が立ち入るといった現場では、日常的な変化であってもロボットにとっては前提条件が崩壊してしまいます。結果として誤動作や停止を引き起こし、現場での運用を阻害しかねません。
環境を理解・推論する内部モデルを持たない
従来型のロボットが未知の状況に対応できない理由として、環境を理解し、将来を推論するための内部モデルを備えていない点が挙げられます。
多くのロボットでは、センサーから得られた情報を制約のルールに結び付ける構造を採用しており、環境全体の状態やその変化を一貫した形で表現していません。この構造では、ロボットは見えている情報に基づいて反応できても、なぜその状態になっているのか、次に何が起こり得るのかを判断することはできません。
例えば、物体がずれた理由や作業が失敗した原因を内部的に説明できないため、同じ誤りを回避するための行動修正が困難になります。
世界モデルの活用に強いAI開発会社の選定・紹介を行います
今年度世界モデルに関する相談急増中!紹介実績1,000件超え!
・ご相談からご紹介まで完全無料
・貴社に最適な会社に手間なく出会える
・AIのプロが貴社の代わりに数社選定
・お客様満足度96.8%超
完全無料・最短1日でご紹介 世界モデルの活用に強いAI開発会社選定を依頼する
世界モデルがロボティクスにもたらす変化とは?

ロボティクスの分野においては、世界モデルの導入によって、環境を理解しながら自律的に判断・行動する存在へと進化します。
環境を「反応」ではなく「理解」できるようになる
世界モデルをロボティクスに適用することで起こる変化として、ロボットが環境に対して理解する存在へと変わる点があります。世界モデルを備えたロボットは、環境の状態・構造・その背後にある因果関係までを内部で表現しながら行動を決定します。
カメラやLiDAR、力覚センサーなどのマルチモーダルな入力を統合し、現在どのような環境に置かれているのか、物体同士がどのような関係にあるのかといった抽象的な状態を推定します。
これにより、「この物体は柔らかいので、少し接触しても安全だ」「この床は滑りやすいので、歩幅を狭めるべきだ」というような因果関係に基づいた理解を行えます。まさに、フィジカルAIとして目の前の状況を数値や座標として処理するのではなく、意味を持った世界として捉えることが可能です。
世界モデルによって環境を理解できるようになることで、ロボットは、現場の状況を把握しながら適応する知的システムへと進化します。
未知の状況に直面しても破綻しにくい自律性
世界モデルを備えたロボットは、未知の状況に直面してもシステムが破綻しにくい自律性を獲得します。これは、あらかじめ定義された動作やルールに依存するのではなく、内部に保持した世界の表現を用いて状況を再解釈したうえで行動を導き出せるためです。
世界モデルを持つロボットは、なぜこの状態になったのか、このまま動作を続けた場合に何が起こり得るのかを内部シミュレーションによって評価できます。その結果、最適解が分からない状況であってもリスクの低い行動や暫定的な回避行動を選択することが可能になります。
また、未知の状況でも破綻しにくいという特性は、運用コストの削減や安全性の確保にも直結します。従来のロボット導入で最大のネックだった環境構築コスト(ロボットに合わせた現場作り)が劇的に削減されます。
内部モデルで学習を完了し、現実での失敗を最小化
従来の強化学習では、現実のロボットを数千時間動かす必要がありましたが、世界モデルを活用した「Dreamer」などのアルゴリズムでは、少ない実データから世界の法則を学び、残りの学習を内部モデルで行います。
現実世界でロボットを壊すリスクを負う前に、潜在空間内の「夢」の中で、数百万通りの失敗を経験させます。これは、ハードウェアの摩耗や事故リスクを大幅に低減することを意味します。
先を見越した判断に基づいてロボットが振る舞う
世界モデルを活用したロボティクスでは、現在の状況に対処するだけでなく、将来起こり得る変化を見越した判断に基づいて行動できるようになります。内部に構築された世界モデルは、環境の状態遷移や因果関係を表現し、行動の結果を事前にシミュレーションします。
複数の行動候補について、数秒後・数分後にどのような状態になるかを予測し、より安定かつ目的達成に近い行動を選択します。例えば、搬送ロボットが「数秒後に人間がこの角から現れる可能性」を予測し、事前に減速・進路変更を行います。
この先読み能力は、作業効率と安全性の両立に直結します。例えば倉庫内の搬送作業では、目先の最短経路だけでなく、将来的な混雑や人の接近を考慮した動線を選ぶことで、停止や衝突のリスクを低減できます。
また、インフラ点検や建設現場のように、足場や周囲環境が変化しやすい領域でも、危険が予測される行動を事前に回避する判断が可能です。
先を見越した判断に基づく振る舞いは、ロボットを単なる作業実行装置から、状況を読んで最適解を選び続ける自律的な行動へと変化します。
判断の解釈性への足がかり
「なぜロボットはその行動をとったのか?」という問いに対し、世界モデルが予測した「未来のイメージ」を可視化することで、エンジニアはロボットの意図を把握しやすくなります。これは安全性が重視される産業現場において、導入の大きな壁を突破する鍵となります。
世界モデル×ロボティクス導入で必要な技術は?
世界モデルをロボティクスに実装するには、概念の理解だけではなく、現実のシステムとして成立させるための技術的な前提条件を整理する必要があります。
世界モデルの実装手法をこちらの記事で詳しく説明していますので併せてご覧ください。
マルチモーダル世界モデル
ロボティクスにおける世界モデルは、視覚データの理解に留まらず、複数の感覚情報を統合したフィジカルAIの基盤へと進化しています。現実世界でAIが「物理的な身体」を使いこなすには、視覚だけでは不十分だからです。
マルチモーダル世界モデルでは、以下のような要素を同一の表現空間に統合します。
| 感覚情報 | 詳細 |
|---|---|
| 視覚 | カメラ画像・動画による物体認識、空間把握、状態変化 |
| 空間・位置 | LiDAR、深度センサー、SLAMによる自己位置推定、地形・構造 |
| 力覚・触覚 | 把持時の力、接触状態、摩擦、硬さ |
| 運動・状態 | 関節角度、速度、加速度、姿勢 |
| 音響 | 異音検知、周囲環境音、人の接近や機械の稼働状況 |
| 環境センサーデータ | 温度、湿度、振動、照度 |
| 言語 | 人からの指示、作業手順、ラベル、ログ |
これにより、ロボットは目の前にあるものをどのように扱うべきか、次に何をすべきかといった高次の判断を行えるようになります。同じ形状の箱であっても、重さや中身の状態に応じて把持方法や搬送速度を変えるといった振る舞いが可能です。
このマルチモーダル世界モデルを実現する取り組みとして、Google DeepMindのGemini Roboticsに代表されるように、世界モデルとLLM(大規模言語モデル)を融合させたVLA(Vision-Language-Action)モデルが挙げられます。言語による抽象的な指示と、センサーから得られる物理世界の情報を結び付け、ロボットが状況に応じて行動を生成することを目指しています。
その結果、事前に細かく定義されていない状況でも文脈を理解しながら適切な行動を選択できるようになり、ロボティクスの実用性と汎用性を高めるでしょう。
Sim2Real
Sim2Realとは、シミュレーション環境で学習・検証したモデルを現実環境へと適用する際に生じるギャップを小さくする技術を指します。従来のロボティクスでは、このギャップが大きく、シミュレーション結果が現実で適用されないという問題が頻発してきました。
世界モデルは、物理法則や環境の遷移構造を内部に学習しているため、見た目の再現ではなく、なぜその動きになるのかという因果関係を含めてシミュレーションできます。これにより、現実環境との細かな差異があってもロボット自身が状況を再解釈し、行動を補正する余地が生まれます。
また、世界モデルを用いたSim2Realでは、実機での試行回数を最小限に抑えることも可能です。従来の強化学習では現実環境で何万回もの試行錯誤が必要でしたが、世界モデル上で行動結果を予測・検証することで危険な動作や非効率な探索を避けられます。
これにより、ロボットの故障リスクや検証コストを大幅に低減できます。
Sim2Realは、世界モデルのロボティクス分野活用を成立させるための基盤となり得る技術です。シミュレーションと現実を往復しながら学習・改善できる構造を持つことで、持続的に性能を高められるロボット運用が可能になります。
再現性・予測性の高いダイナミクスモデリング
フィジカルAIの性能を左右するのが、時間経過に伴う状態変化を予測するダイナミクスモデリングです。ダイナミクスモデリングとは、ロボットの動作や環境の変化が、時間の経過とともにどのように状態遷移するかをモデル化することを指します。
この精度が低い場合と、高度な制御アルゴリズムを用いても実世界での挙動は不安定になります。
例えば、トヨタ・リサーチ・インスティテュート(TRI)などが推進するLBM(大規模行動モデル)は、腕の動き(操作)と足の動き(移動)を別々に制御するのではなく、一つの世界モデルが全身のダイナミクスを統合して予測・制御します。
従来のロボティクスでは、物理エンジンや数式モデルに依存するケースが多く、摩擦・剛性・荷重変化といった要素を表現できませんでした。一方の世界モデルでは、実データに基づいて環境とロボットの相互作用を学習し、現実に近いダイナミクスを内部に獲得します。
再現性の高いダイナミクスモデルは、ロボットが自らの行動を評価・修正します。把持動作に失敗した場合でも、どの要因が影響したのかをモデル上で分析し、次の試行では動作パラメータを調整するといった自己改善が可能です。
予測性の高いダイナミクスモデリングを実現することで、中長期的な計画や最適化にも対応できるロボットシステムが実現します。
計算リソース・リアルタイム性の両立
ロボティクスにおける世界モデルを実運用に耐えるシステムを成立させるには、高度な推論を行う計算リソースと現場で求められるリアルタイム性を両立させる必要があります。
世界モデルは環境理解や将来予測を内部で行うため、計算負荷が大きくなりがちです。この点を考慮せずに設計すると、判断の遅延が安全性や作業効率を損なうリスクが高まります。
実務においては、すべての推論を高精度モデルで処理するのではなく、役割を分担したアーキテクチャ設計が重要になります。長期的な予測や計画は高性能な計算環境で行い、現場では軽量化されたモデルを用いて高速に意思決定できる構成にします。
これにより、世界モデルの知的な判断能力を維持しつつ、リアルタイムでの制御に必要な応答速度を確保することが可能です。
また、エッジ側とクラウド側の計算リソースの使い分けも重要です。通信遅延やネットワーク断を考慮すると、安全性に直結する判断はロボット側で完結させる必要があります。
一方で、学習やシミュレーションはクラウドで集中的に行うことで効率的な運用が可能です。
計算リソースとリアルタイム性の両立は、世界モデルのロボティクスを現場に根付かせるための設計思想そのものともいえます。そのため、2つのバランスを取ることが大切になるのです。
評価指標と運用KPI
世界モデルのロボティクスを導入する際には、従来とは異なる視点での評価指標と運用KPIの設計が必要です。単純な成功率や処理速度だけでは、世界モデルがもたらす予測・推論能力や自律性の価値を測定できません。
技術的な評価指標として重要になるのは、環境予測の精度や状態遷移の再現性です。
- モデルが予測した未来状態と実際の結果の乖離
- 未知環境における行動の安定性
- 想定外の事象発生時にどの程度自己修正できるか
これらは、世界モデルが近似ではなく、現実の構造をどれだけ正確に捉えているかを示す指標になります。
一方、事業活用を前提とした運用KPIでは現場視点での成果が重視されます。以下のような指標は、世界モデルの導入効果を直接的に反映します。
- MSE(平均二乗誤差)
- MAE(平均絶対誤差)
- Zero-shot Success Rate
- Generalization Gap
- Near-miss Rate(ヒヤリハット発生率)
また、安全性や信頼性も重要なKPIとなります。予期しない状況での異常停止や、現場オペレーターの介入回数などは、世界モデルによる自律判断が実運用で機能しているかを判断する指標になります。
評価指標と運用KPIを適切に設計することで、ロボティクスは改善サイクルを回せる実用的なシステムとして定着します。
世界モデルの活用に強いAI開発会社の選定・紹介を行います
今年度世界モデルに関する相談急増中!紹介実績1,000件超え!
・ご相談からご紹介まで完全無料
・貴社に最適な会社に手間なく出会える
・AIのプロが貴社の代わりに数社選定
・お客様満足度96.8%超
完全無料・最短1日でご紹介 世界モデルの活用に強いAI開発会社選定を依頼する
世界モデル搭載のロボティクスの活用領域

世界モデルを搭載したロボティクスは、これまでロボットによる対応が難しかった不確実性の高い現場にも適用可能性を広げることが可能です。
倉庫・物流
倉庫・物流の分野は世界モデルによるロボティクスが効果的な領域ですが、荷物の形状や配置、人の動線が日々変化する不確実性が高い現場です。そのため、事前にすべてを想定したルール設計は現実的ではなく、ロボットの導入を妨げる障壁となっていました。
しかし、世界モデルを搭載したロボットは、倉庫内の空間構造や物体同士の関係性を内部で理解しながら行動します。そのため、棚配置や通路状況が変わっても、その都度ティーチングを行うことなく搬送経路や作業手順を組み替えられます。
特に、多品種少量のピッキングや仕分け作業では、Zero-shotに近い形で新しい商品や配置に対応することが可能です。
また、混雑や人の接近といった動的な変化に対しても、先を見越した判断が可能になります。さらには将来的な詰まりや待ち時間を予測し、全体効率を考慮した動線を選択できるため、倉庫全体としての生産性向上につながります。
インフラ点検・保守
インフラ点検・保守の分野は環境のばらつきや予測困難性が大きいた領域です。橋梁やトンネル、配管・送電設備などは構造や劣化状況が個別に異なり、事前に想定されたシナリオだけで安全に作業を行うことは困難でした。
世界モデルを活用することで、ロボットは点検対象の構造や周囲環境を理解しながら行動できるようになります。センサー情報を統合して部材の関係性を把握し、ひび割れや腐食といった異常が将来的にどれくらい進行するかを推定することも可能です。
また、点検現場では足場の不安定さ、視界不良、天候変化といった想定外の要因が頻繁に発生し、リスクが高い現場でもあります。世界モデルを持つロボットであれば、こうした変化を局所的な異常としてではなく、全体状況の一部として捉え直し、安全性を優先した行動に切り替えることができます。
世界モデルは、ロボットによるインフラ点検・保守を巡回型の作業から、状態と予測に基づく運用へと変革していくことでしょう。
建設
建設現場では、作業や環境が日々変化し、計画通りに進まないことが前提となる領域です。資材の配置、重機や作業員の動線、天候や地盤状況など、多くの不確実要素が同時に存在するため、従来型ロボットによる自動化は限定的でした。
そこで、世界モデルのロボティクスを適用することで、現場の空間や作業進捗を理解しながら行動することを可能にします。資材搬送や組立補助においても、設計図通りでない状況を前提に、その場の状態を解釈しながら手順を選択できます。
これにより、現場ごとに細かく作り込む必要があった設計を大幅に簡素化できます。
また、建設現場では安全性が最優先されるため、世界モデルを備えたロボットによって、人や重機の動きを含めた将来を予測し、危険が生じる可能性のある行動を事前に回避します。これによって事故のリスクを低減しつつ、人と協調した作業も可能です。
農業
農業も天候や土壌の状態、作物の生育状況といった、制御不能な要因が複雑に絡み合うため、ロボット導入の難易度が高い領域です。同じ作業であっても圃場ごと、季節ごとに条件が異なり、従来のロボットでは細かな設定や再設計が必要でした。
世界モデルはこれらの課題を克服し、作物や圃場の状態をデータではなく、変化し続ける環境として理解しながらロボットが行動します。位置情報や生育データも統合し、収穫・除草・施肥といった作業に応じて調整することが可能です。
これにより、作物の個体差や成長段階の違いにも対応できるようになります。
また、農業では作業のタイミングが収量や品質に直結します。世界モデルを持つロボットは、将来の生育状態を見据えた判断ができるため、過剰作業や無駄な移動を抑制できます。これは、経験豊富な作業者の判断を、システムとして再現・拡張するアプローチとも言えます。
担い手不足や高齢化が進む中で、持続可能な農業を支える技術基盤として、世界モデルのロボティクス活用は実用化が期待されています。
世界モデルのロボティクス分野活用についてよくある質問まとめ
- 世界モデルによってロボティクスはどう変化しますか?
ロボットが環境を「理解」し、先を「予測」して動くようになります。
- 意味的な理解: 物体の柔らかさや床の滑りやすさといった物理的意味を考慮した行動選択が可能です。
- 自律的な回避: 内部シミュレーションにより、数秒後に起こり得るリスク(人の接近など)を予見して回避行動をとります。
- 失敗からの学習: 動作に失敗しても、内部モデル上で原因を分析し、自律的に動作パラメータを修正します。
- 世界モデルを搭載したロボティクスを活用できる領域・分野は?
世界モデルを搭載したロボティクスは、不確実性が高く、環境変化が避けられない以下のような分野で特に効果を発揮します。
- 倉庫・物流
- インフラ点検・保守
- 建設
- 農業
- 世界モデルの導入は非常に高コストなイメージがあります。小規模な現場から段階的に導入することは可能ですか?
はい、可能です。最新の世界モデルは「ロボット基盤モデル」として汎用化が進んでおり、特定の作業に特化したフルスクラッチ開発を避けることでコストを抑えるアプローチが増えています。 AI Marketでは、貴社の予算規模や現場のフェーズに合わせて、スモールスタートが可能な開発企業や、既存資産を活かしたAI化を支援できるコンシェルジュが最適なパートナーをご提案します。
- Sim2Realの技術があるとはいえ、現実の現場で事故が起きないか不安です。安全性を担保する評価指標はどう考えればよいですか?
世界モデル自体の「予測精度(MSE等)」に加え、現場視点での「ヒヤリハット発生率」や「手動介入回数」をKPIに据えることが一般的です。 AI Marketでは、技術的な評価指標の策定から伴走できるコンサルティング会社や、安全基準を重視したフィジカルAI開発の実績が豊富なパートナーを繋ぎ、経営層が安心して投資判断を下せる体制構築を支援します。
まとめ
ロボティクス分野における世界モデルは、決められた動作を正確に繰り返すロボットから、環境を理解し、先を見越して判断する自律的なロボットへと進化させる可能性を秘めています。
世界モデルを中核に据えたロボティクスは、環境理解・予測・計画を内在化することで、再設計やティーチングに依存しない運用を可能にします。これにより、多品種少量生産や非定型作業が常態化する現場でも持続的に価値を発揮できるようになります。
一方で、世界モデルを実務レベルで実装するには、エッジとクラウドの計算リソース配分や、現場固有のデータ戦略など高度な設計思想が求められます。自社の課題に対してどの技術要素を優先すべきか、あるいはどの開発パートナーと組むべきかの判断には専門的な知見による裏付けが欠かせません。
より具体的な実装フェーズへの移行や自社に最適なソリューションの選定に際しては、専門家のアドバイスを活用しながら着実にステップを進めることが投資リスクを抑えつつ成果を最大化する鍵となります。

AI Market 運営、BizTech株式会社 代表取締役|2021年にサービス提供を開始したAI Marketのコンサルタントとしても、お客様に寄り添いながら、現場のお客様の課題ヒアリングや企業のご紹介を5年以上実施しています。これまでにLLM・RAGを始め、画像認識、データ分析等、1,000件を超える様々なAI導入相談に対応し、参加累計5,000人を超えるAIイベントを主催。AIシステム開発PM歴8年以上。AI Marketの記事では、AIに関する情報をわかりやすくお伝えしています。(JDLA GENERAL 資格保有)
AI Market 公式𝕏:@AIMarket_jp
Youtubeチャンネル:@aimarket_channel
TikTok:@aimarket_jp
運営会社:BizTech株式会社
掲載記事に関するご意見・ご相談はこちら:ai-market-contents@biz-t.jp

